Rail Nodes
NITOS team made a mobile node which can be used in exterior environment. The node moves along rails following a predefined path. Its movements and velocity can be programmed and scheduled through a web interface. The NITosRail Robot is equipped with a low-cost high-precision range finder so as to track the exact location of the node along the rail.

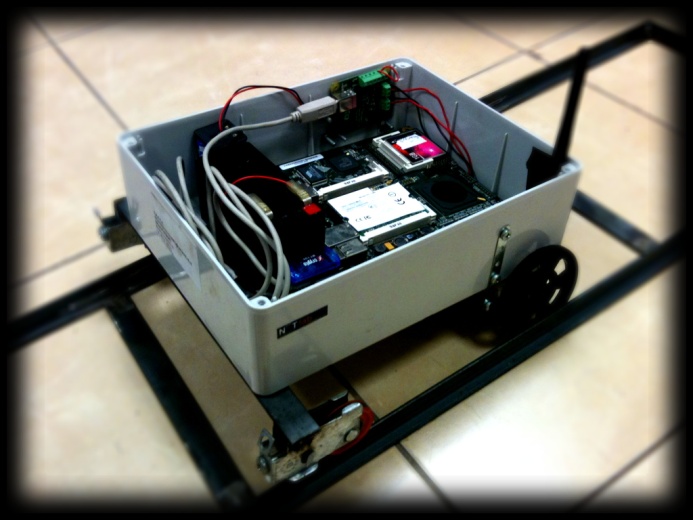
NITosRail Vehicle (NRV) Components:
- Main board, Alix Board
- Motor drive system, PhidgetMotorControl LV
- Motors
- 2 Atheros wireless network cards.
- USB Bluetooth dongle
- Pixart Infrared Camera from Nintendo Wii Remote
- Custom Infrared Emitter Boards
- 8 dbi Omni-Directional Antenna

The main board, Alix Board
The Alix Board is the heart of NRV being the board that all the components are connected. It is powered by a 12V 1A battery, runs Voyage Linux and is equipped with 1Gb compact flash memory card as a hard disk. This main board is low-power and has a plethora of connectivity. Its hardware specifications are:
- CPU: 500 MHz AMD Geode LX800

- DRAM: 256 MB DDR DRAM
- Storage: Compact Flash socket
- Power: DC jack or passive POE, min. 7V to max. 20V
- Three front panel LEDs, pushbutton
- Expansion: 2 mini PCI slots, LPC bus
- Connectivity: 2 Ethernet channels (Via VT6105M 10/100)
- I/O: DB9 serial port, dual USB port
- For more information, click here
Motor Drive System, PhidgetMotorControl LV
The PhidgetMotorControl LV is a USB based controller that can control two low-voltage brushed DC motors independently for direction, velocity and acceleration. The board includes overcurrent protection and four Digital Inputs that can be used to convey the state of devices such as push buttons, limit switches, relays, and logic levels. It is powered by a 6V 1.5A battery. The Drive System board connects directly to Alix Board’s USB port and receives the movement commands from MotorControlNIT.py
Motors
The two low-voltage continuous rotation motors are powered and controlled directly by the motor drive system.
- Continuous Rotation
- Fully Proportional Speed
- Dual Ball Bearings on the output shaft
USB Bluetooth Dongle
The USB Bletooth Dongle by Crypto is used for the communication of the ALIX Board and Wii Remote’s Infrared Camera. It is well-supported by bluez drivers in Linux.
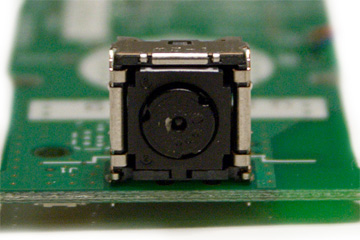
Pixart Infrared Camera from Nintendo Wii Remote

Our project required a way to track the location of the mobile node during the experiments. The Pixart Camera in the Nintendo Wii Remote allowed us to implement a low-cost and high-precision range finder. The camera tracks up to four infrared leds. We exploit the open-source CWiid library and succeed in getting the x,y positions of a pair of leds that have a 25cm distance between. We found that the camera could recognize the pair of infrared leds from 25cm up to 3m reliably. We made some measurements for 25cm, 50cm, 75cm, 1m, 1.5, 2, 2.5, 3, 3.6 (maximum viewing distance) and get the corresponding distance of pixels between the led-points that the camera tracks. Making linear interpolation we create the range finder. The features of the camera are:
- 128x96 monochrome camera with built-in image processing
- Capable of tracking up to four infrared targets
- Built-in processor uses 8x subpixel analysis to provide 1024x768 resolution for the tracked points
- Sensitive to wide spectrum of light, uses an infrared pass filter in the remote's casing
- 100Hz refresh rate for tracking targets
- Horizontal field of view around 40 degrees
- Requires 20~25Mhz reference clock
- For more information, click here
Custom Infrared Emitter Boards

The IR LEDs we purchased had an operating voltage of 1.5v with like 15mA current draw. We connected three LEDs in series which made the voltage required 4.5V which leaves only half a volt to deal with. We used 22 ohm resistor. Every pair of boards is placed every 3 meters along the rail.



